


3D printed devices are increasingly developed to enable activities under water. Last week, we talked about a gill that enables to continuously breathe under water. Today, we discovered that a robotic fish might probably improve underwater exploration, observation and research projects; in a few words, missions where maneuverability is required.
If we had to judge its performance based on its shape, we would have said that the fact that it has the form of a fish makes it the ideal candidate for such operation. The bio-inspired fish has flexible tail mechanism. It can function with lower consumption and higher maneuverability in water where a traditional propeller AUV cannot reach.
The construction
The robotic fish has been fabricated by research engineers from the University of Firat in Turkey. They used biomimetic design and 3D printing as main technologies to fabricate the fish.
“For the design procedure, a multi-link biomimetic approach, which uses the physical characteristics of a real carp fish as its size and structure, is adapted. Appropriate body rate is determined according to swimming modes and tail oscillations of the carp. … the characteristics of the robotic fish are performed with forward, turning, up-down and autonomous swimming motions in the experimental pool. Maximum forward speed of the robotic fish can reach 0.8516 BLs-1 and excellent three-dimensional swimming performance is obtained.”
It should be noted that during the design, the makers laid emphasis on the swimming modes as well as the body shape of the fish. They explained that over 15% of fish swim by median and/or pectoral fins whereas the rest bends their bodies. These statistics show that BCF type Carangiform robot model is the ideal technique for AUV design.
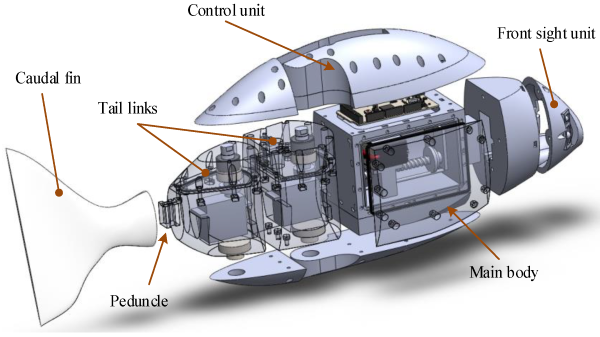
“There are two basic approaches in robotic fish design,” the researchers wrote. “First is the biomimetic design which has certain requirements such as a tail with the size and number of joints to provide body travelling wave, and the ability to stay at a certain depth with the control of the center of gravity. The second design approach uses only the movement effects of fish, but it is not physically inspired by real fish.”
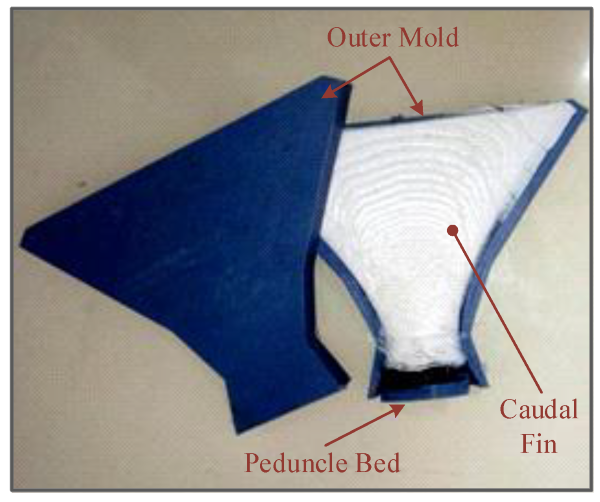 As far as 3D technologies are concerned, SolidWorks was exploited to design the 3D models. The prototype is 3D printed with PLA and the flexible caudal fin is produced using mold silicone, which has been manufactured using 3D printing technology. They covered the parts with with epoxy resin to prevent possible leakage from the micro pores formed in the production process.
As far as 3D technologies are concerned, SolidWorks was exploited to design the 3D models. The prototype is 3D printed with PLA and the flexible caudal fin is produced using mold silicone, which has been manufactured using 3D printing technology. They covered the parts with with epoxy resin to prevent possible leakage from the micro pores formed in the production process.
The full work is entitled “Mechatronic Design and Manufacturing of the Intelligent Robotic Fish for Bio-Inspired Swimming Modes,”; it is authored by Mustafa Ay, Deniz Korkmaz, Gonca Ozmen Koca, Cafer Bal, Zuhtu Hakan Akpolat, and Mustafa Can Bingol. It has been published on ResearchGate.
For further information about 3D Printing, follow us on our social networks and subscribe to our newsletter
Would you like to subscribe to 3D Adept Mag? Would you like to be featured in the next issue of our digital magazine? Send us an email at contact@3dadept.com
//pagead2.googlesyndication.com/pagead/js/adsbygoogle.js
(adsbygoogle = window.adsbygoogle || []).push({});


