


Les dispositifs imprimés en 3D sont de plus en plus développés pour permettre des activités sous l’eau. La semaine dernière, nous parlions d’une branchie qui permet de respirer continuellement sous l’eau. Aujourd’hui, nous avons découvert qu’un poisson robotique pourrait probablement améliorer les projets d’exploration, d’observation et de recherche sous-marine ; en quelques mots, des missions où la manœuvrabilité est requise.
Si nous devions juger ses performances en fonction de sa forme, nous aurions dit que le fait qu’il a la forme d’un poisson en fait le candidat idéal pour une telle opération. Le poisson d’inspiration biologique est doté d’un mécanisme de queue flexible. Il peut fonctionner avec une consommation plus faible et une plus grande maniabilité dans l’eau où une hélice traditionnelle AUV ne peut pas atteindre.
La construction
Le poisson robotique a été fabriqué par des ingénieurs de recherche de l’Université de Firat en Turquie. Ils ont utilisé la conception biomimétique et l’impression 3D comme principales technologies pour fabriquer le poisson.
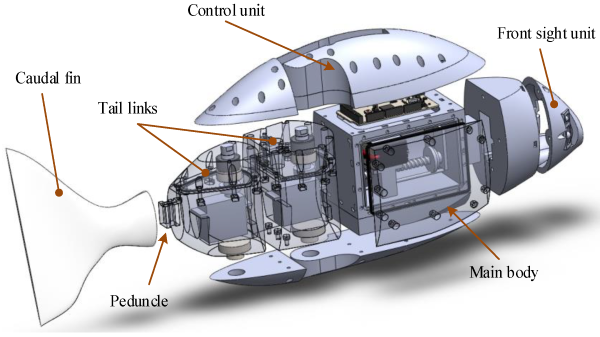
« Pour la procédure de conception, une approche biomimétique à liens multiples, qui utilise les caractéristiques physiques d’un vrai poisson carpe comme taille et structure, est adaptée. Le rythme corporel approprié est déterminé en fonction des modes de nage et des oscillations de la queue de la carpe…. Les caractéristiques des poissons robotisés sont exécutées avec des mouvements de nage vers l’avant, de rotation, vers le haut, vers le bas et mouvements autonomes dans la piscine expérimentale. La vitesse maximale d’avancement du robot poisson peut atteindre 0,8516 BLs-1 et d’excellentes performances de nage tridimensionnelle ont été obtenues. »
 Il est à noter que lors de la conception, les fabricants ont mis l’accent sur les modes de nage ainsi que sur la forme du corps des poissons. Ils ont expliqué que plus de 15% des poissons nagent par des nageoires médianes et/ou pectorales alors que le reste se plie. Ces statistiques montrent que le modèle de robot Carangiforme de type BCF est la technique idéale pour la conception des VSA.
Il est à noter que lors de la conception, les fabricants ont mis l’accent sur les modes de nage ainsi que sur la forme du corps des poissons. Ils ont expliqué que plus de 15% des poissons nagent par des nageoires médianes et/ou pectorales alors que le reste se plie. Ces statistiques montrent que le modèle de robot Carangiforme de type BCF est la technique idéale pour la conception des VSA.
« Il y a deux approches de base dans la conception de robots poissons, ont écrit les chercheurs. Le premier est la conception biomimétique qui a certaines exigences telles qu’une queue avec la taille et le nombre d’articulations pour fournir une onde de déplacement du corps, et la capacité de rester à une certaine profondeur avec le contrôle du centre de gravité. La seconde approche de conception n’utilise que les effets de mouvement des poissons, mais elle n’est pas physiquement inspirée par de vrais poissons. »
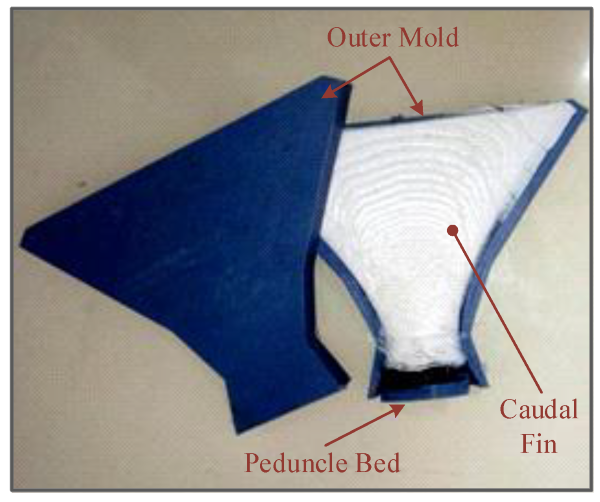 En ce qui concerne les technologies 3D, SolidWorks a été exploité pour concevoir les modèles 3D. Le prototype est imprimé en 3D avec le filament PLA et l’aileron caudal flexible est fabriqué à l’aide de silicone de moulage, qui a été fabriqué en utilisant la technologie d’impression 3D. Ils ont recouvert les pièces de résine époxy afin d’éviter d’éventuelles fuites des micropores formés lors du processus de production.
En ce qui concerne les technologies 3D, SolidWorks a été exploité pour concevoir les modèles 3D. Le prototype est imprimé en 3D avec le filament PLA et l’aileron caudal flexible est fabriqué à l’aide de silicone de moulage, qui a été fabriqué en utilisant la technologie d’impression 3D. Ils ont recouvert les pièces de résine époxy afin d’éviter d’éventuelles fuites des micropores formés lors du processus de production.
L’ouvrage complet est intitulé “Mechatronic Design and Manufacturing of the Intelligent Robotic Fish for Bio-Inspired Swimming Modes”; il est écrit par Mustafa Ay, Deniz Korkmaz, Gonca Ozmen Koca, Cafer Bal, Zuhtu Hakan Akpolat et Mustafa Can Bingol. Il a été publié sur ResearchGate.
Pour des informations exclusives sur l’impression 3D, abonnez-vous à notre newsletter et suivez-nous sur les réseaux sociaux !
Vous souhaitez-vous abonner à 3D ADEPT Mag ? Ou vous voulez figurer dans le prochain numéro de notre magazine numérique ? Envoyez-nous un email à contact@3d


